Khảo sát địa hình
Hệ GNSS Base – Rover ngoài thực địa hoạt động ra sao? Quy trình vận hành đầy đủ cho kỹ sư khảo sát

Th6
Hệ GNSS Base – Rover cho phép xác định tọa độ ngoài thực địa với độ chính xác cấp centimet nhờ cơ chế truyền dữ liệu hiệu chỉnh thời gian thực từ trạm Base đến trạm Rover. Để đạt được kết quả tin cậy, người vận hành cần thiết lập và vận hành hệ GNSS đúng quy trình.
Hệ GNSS Base – Rover là gì và vì sao cần đến hai trạm thu?
GNSS (Global Navigation Satellite System) là tên gọi chung cho các hệ thống định vị vệ tinh toàn cầu, bao gồm GPS của Hoa Kỳ, GLONASS của Nga, Galileo của Liên minh châu Âu và BeiDou của Trung Quốc. Một máy thu GNSS hiện đại có thể bắt tín hiệu đồng thời từ hàng chục vệ tinh thuộc cả bốn hệ thống này, qua đó xác định vị trí của chính nó trên bề mặt Trái Đất.
Vấn đề là nếu chỉ dùng một máy thu đơn lẻ, sai số định vị thường ở mức mét. Tín hiệu vệ tinh trên đường truyền phải xuyên qua tầng điện ly và tầng đối lưu – hai lớp khí quyển làm tín hiệu bị khúc xạ và trễ pha. Cộng thêm sai số quỹ đạo vệ tinh, sai số đồng hồ vệ tinh và hiện tượng đa đường dẫn (tín hiệu phản xạ từ mặt nước, nhà cao tầng), kết quả định vị tuyệt đối không thể đáp ứng yêu cầu của công tác trắc địa công trình.
Hệ GNSS Base – Rover ra đời để giải quyết triệt để bài toán này theo nguyên lý định vị tương đối. Hai máy thu đặt gần nhau sẽ chịu các nguồn sai số khí quyển gần như giống hệt nhau. Nếu một máy thu GNSS được đặt cố định tại điểm đã biết tọa độ chính xác, nó có thể tính ra lượng sai số tại thời điểm đó và gửi thông tin cải chính cho máy còn lại.

Trong một hệ GNSS Base – Rover cần ít nhất hai thiết bị (một thiết bị làm trạm Base và một thiết bị làm trạm Rover).
- Trạm Base (trạm tĩnh): Được dựng cố định trên mốc khống chế đã biết tọa độ. Trạm liên tục thu tín hiệu vệ tinh, so sánh vị trí tính được với tọa độ chuẩn của mốc để xác định lượng sai số, sau đó phát số liệu cải chính ra môi trường xung quanh.
- Trạm Rover (trạm động): Do người đo mang theo, di chuyển đến từng điểm cần xác định tọa độ. Trạm vừa thu tín hiệu vệ tinh, vừa tiếp nhận số liệu cải chính từ trạm Base để loại trừ sai số chung, cho ra tọa độ với độ chính xác cấp centimet ngay trong thời gian thực.
Nguyên lý hiệu chỉnh sai số trong đo động thời gian thực
Máy thu GNSS dùng cho trắc địa không chỉ đo theo mã giả khoảng cách như thiết bị định vị dân dụng, mà còn đo theo pha sóng tải. Bước sóng của sóng tải chỉ khoảng 19cm – 24cm, nên nếu xác định được chính xác số nguyên lần bước sóng giữa vệ tinh và máy thu (bài toán giải đa trị nguyên), khoảng cách đo được sẽ đạt độ chính xác cấp milimet.
Số liệu cải chính từ trạm Base được đóng gói theo chuẩn quốc tế RTCM và truyền liên tục đến trạm Rover với tần suất mỗi giây một lần. Bộ xử lý trong trạm Rover kết hợp trị đo của chính nó với số liệu cải chính nhận được, lập hiệu các trị đo để khử sai số đồng hồ, sai số quỹ đạo và phần lớn ảnh hưởng của khí quyển, từ đó giải ra véc-tơ cạnh giữa hai trạm (còn gọi là đường đáy) với độ tin cậy rất cao.
Cần lưu ý: Độ chính xác của phép đo suy giảm theo chiều dài đường đáy. Thông số danh định của đa số máy thu hiện nay vào khoảng 8 milimet cộng 1 phần triệu khoảng cách cho thành phần mặt bằng. Điều này nghĩa là khi Rover cách Base 10km, riêng thành phần phụ thuộc khoảng cách đã đóng góp thêm 10 milimet sai số.
Vì lý do đó, khi đo thực tế nên giữ bán kính hoạt động của Rover trong phạm vi 10km đến 15km quanh trạm Base để bảo đảm chất lượng lời giải.
Lựa chọn phương thức truyền số liệu cải chính cho hệ GNSS: Radio hay Internet?
Trước khi ra hiện trường, quyết định đầu tiên người đo phải đưa ra là chọn kênh truyền số liệu cải chính giữa hệ GNSS – Base và Rover. Lựa chọn này ảnh hưởng trực tiếp đến phạm vi làm việc, độ ổn định kết nối và cả chi phí vận hành hằng ngày.
– Truyền bằng Radio (sóng vô tuyến)
Trong hệ GNSS Base – Rover, trạm Base có thể phát số liệu cải chính qua sóng vô tuyến dải tần UHF. Nếu dùng mô-đun phát tích hợp bên trong máy, phạm vi phủ sóng thường đạt 3km đến 5km trong điều kiện thông thoáng. Nếu dùng bộ phát rời công suất lớn (25W đến 35W) kết hợp ăng-ten dựng cao, phạm vi có thể mở rộng lên 10km đến 15km.
Ưu điểm lớn nhất của phương thức này là hoàn toàn độc lập với hạ tầng viễn thông, phù hợp với các công trình ở vùng sâu, vùng xa không có sóng điện thoại. Nhược điểm là phạm vi bị giới hạn bởi địa hình che chắn và cần mang theo thêm bộ phát, ắc-quy.
– Truyền qua Internet theo giao thức NTRIP
Với phương thức này, trạm Base đẩy số liệu cải chính lên một máy chủ trung gian trên Internet, trạm Rover dùng SIM 4G hoặc 5G để tải số liệu về. Phạm vi làm việc về lý thuyết không bị giới hạn bởi khoảng cách truyền sóng, miễn là cả hai đầu đều có kết nối mạng ổn định.
Đây cũng là nền tảng của các mạng lưới trạm tham chiếu hoạt động liên tục (CORS), cho phép người đo chỉ cần một máy Rover duy nhất và đăng ký tài khoản thuê bao để nhận số liệu cải chính từ hệ thống trạm có sẵn, không cần dựng trạm Base riêng.
Nguyên tắc lựa chọn trong thực tế: Khu vực đô thị, đồng bằng có sóng di động tốt nên ưu tiên NTRIP hoặc dịch vụ CORS vì tính tiện lợi và phạm vi rộng, khu vực miền núi, hải đảo, vùng lõm sóng nên dùng sóng vô tuyến để bảo đảm kết nối không bị gián đoạn. Nhiều đơn vị thi công chuyên nghiệp trang bị cả hai phương án để linh hoạt chuyển đổi theo điều kiện từng công trình.
Xem thêm: [Từ 1/9/2024] Mức đóng phí sử dụng trạm CORS (trạm định vị vệ tinh quốc gia)
Công tác chuẩn bị trước khi ra thực địa
Phần lớn sự cố ngoài hiện trường đều bắt nguồn từ khâu chuẩn bị hệ GNSS sơ sài. Một buổi đo bị gián đoạn giữa chừng vì hết pin hay sai hệ tọa độ sẽ tiêu tốn chi phí nhân công và thời gian gấp nhiều lần so với việc kiểm tra kỹ lưỡng trước khi xuất phát.
– Kiểm tra thiết bị và phụ kiện
- Sạc đầy pin cho cả hai máy thu GNSS, bộ điều khiển và bộ phát vô tuyến, mang theo pin dự phòng nếu khối lượng đo lớn.
- Kiểm tra dung lượng và tốc độ gói cước của SIM dữ liệu nếu đo theo phương thức NTRIP.
- Kiểm tra chân máy, đế dọi tâm, sào đo, bọt thủy trên sào và thước đo chiều cao ăng-ten, bọt thủy lệch sẽ làm sai lệch toàn bộ kết quả đo.
– Thiết lập dự án trên bộ điều khiển
Trên bộ điều khiển, tạo một dự án mới và khai báo đầy đủ các thông số của hệ quy chiếu trước khi đo.
Với các công trình tại Việt Nam, cần chọn hệ tọa độ VN-2000, khai báo múi chiếu 3 độ hoặc 6 độ theo yêu cầu của dự án, nhập kinh tuyến trục địa phương của tỉnh, thành nơi thi công và bộ 7 tham số tính chuyển từ hệ WGS-84 về VN-2000. Chỉ cần một tham số bị nhập sai, toàn bộ tọa độ thu được sẽ lệch hệ thống mà rất khó phát hiện bằng mắt thường.
– Kiểm tra mốc khống chế
Xác định trước vị trí mốc tọa độ nhà nước hoặc mốc khống chế của dự án sẽ dùng để đặt trạm Base. Cần đối chiếu số hiệu mốc với hồ sơ, kiểm tra tình trạng vật lý của mốc (còn nguyên vẹn, không bị xê dịch) và đánh giá độ thông thoáng bầu trời tại vị trí mốc. Nếu mốc nằm dưới tán cây rậm hoặc sát công trình cao tầng, nên cân nhắc chuyền tọa độ ra một điểm khác thông thoáng hơn.
Quy trình lắp đặt và vận hành trạm Base
Vai trò của trạm Base là gốc tham chiếu của toàn bộ hệ GNSS. Mọi sai sót tại trạm Base – dù là nhập sai tọa độ, đo sai chiều cao ăng-ten hay dọi tâm lệch – đều truyền nguyên vẹn vào tất cả các điểm mà trạm Rover thu thập được. Vì vậy đây là khâu đòi hỏi sự cẩn trọng cao nhất trong cả quy trình.

Vai trò của trạm Base là gốc tham chiếu của toàn bộ hệ GNSS Base – Rover.
– Bước 1: Dựng máy tại điểm mốc
- Dựng chân máy vững chắc phía trên mốc, lắp đế dọi tâm và máy thu lên chân máy.
- Cân bằng bọt thủy tròn và bọt thủy dài, đồng thời dọi tâm quang học hoặc dọi tâm laser chính xác vào tâm dấu mốc. Hai thao tác này cần thực hiện luân phiên cho đến khi cả hai điều kiện đồng thời thỏa mãn.
- Đo chiều cao ăng-ten: Đo từ tâm dấu mốc lên đến vị trí quy định trên thân máy (thường là rãnh đo cao hoặc mặt đáy máy). Nên đo ở ít nhất hai hướng đối diện và lấy giá trị trung bình. Đây là thông số quyết định độ chính xác của thành phần cao độ, nên cần ghi chép cẩn thận kèm phương pháp đo (đo nghiêng hay đo thẳng đứng) để phần mềm quy đổi đúng về tâm pha ăng-ten.
– Bước 2: Thiết lập kênh truyền số liệu cải chính
Tùy phương án đã chọn ở phần trên, tiến hành cấu hình kênh truyền.
- Với sóng vô tuyến: Đặt tần số phát, giao thức truyền và tốc độ truyền. Nếu dùng bộ phát rời, kết nối cáp tín hiệu, dựng ăng-ten phát càng cao càng tốt và cấp nguồn từ ắc-quy.
- Với phương thức NTRIP: Khai báo địa chỉ máy chủ, cổng kết nối, tên điểm truy cập cùng tài khoản đăng nhập, sau đó kiểm tra trạng thái đẩy dữ liệu lên máy chủ đã thành công hay chưa.
– Bước 3: Khởi chạy trạm Base trên bộ điều khiển
- Kết nối bộ điều khiển với máy Base qua Bluetooth.
- Nhập tọa độ chuẩn của mốc khống chế vào phần mềm, tuyệt đối không dùng chức năng lấy tọa độ tức thời của máy làm tọa độ trạm Base khi dự án yêu cầu độ chính xác tuyệt đối trong hệ quy chiếu quốc gia.
- Nhập chiều cao ăng-ten đã đo cùng phương pháp đo tương ứng.
- Nhấn lệnh khởi động trạm Base và quan sát đèn báo hoặc biểu tượng phát số liệu để xác nhận trạm đã bắt đầu truyền số liệu cải chính.
Sau khi trạm Base hoạt động, hãy chụp ảnh toàn cảnh trạm cùng sổ ghi chiều cao ăng-ten. Bức ảnh này là bằng chứng đối soát quan trọng khi cần rà soát số liệu về sau.
Xem thêm: Trạm Base hãng Trimble – Trimble R750
Quy trình thiết lập và cấu hình trạm Rover
Khi trạm Base đã phát số liệu ổn định, chuyển sang thiết lập trạm Rover. So với trạm Base, thao tác ở trạm Rover đơn giản hơn nhưng đòi hỏi sự đồng bộ về cấu hình giữa hai trạm. Các bước thực hiện như sau:
- Lắp máy thu lên sào đo, vặn chặt khớp nối và kiểm tra bọt thủy trên sào. Chiều cao sào thường đặt cố định ở mức 1,8 mét hoặc 2,0 mét và phải khai báo đúng giá trị này trong phần mềm.
- Kết nối bộ điều khiển với máy Rover qua Bluetooth.
- Cấu hình kiểu đo trùng khớp hoàn toàn với trạm Base: Nếu dùng sóng vô tuyến thì phải cùng tần số và cùng giao thức truyền, nếu dùng NTRIP thì phải đăng nhập đúng máy chủ, đúng tài khoản và chọn đúng điểm truy cập mà trạm Base đang đẩy dữ liệu lên.
- Kiểm tra biểu tượng truyền dữ liệu trên màn hình: Khi Rover bắt đầu nhận được gói số liệu cải chính, bộ đếm dữ liệu sẽ nhảy liên tục theo từng giây.

Trạm Rover đã được thiết lập cấu hình ngoài thực địa.
Xem thêm: Trạm Rover hãng Trimble – Trimble R780
Hiểu đúng các trạng thái lời giải: Single, Float và Fixed
Đây là kiến thức then chốt quyết định chất lượng số liệu. Màn hình bộ điều khiển luôn hiển thị trạng thái lời giải hiện thời của trạm Rover, và người đo bắt buộc phải hiểu ý nghĩa của từng trạng thái trước khi bấm nút đo.
- Single (định vị đơn): Máy chỉ thu tín hiệu vệ tinh đơn thuần, chưa nhận hoặc chưa áp dụng được số liệu cải chính. Sai số ở mức vài mét, tuyệt đối không dùng để thu thập số liệu trắc địa.
- Float (lời giải động): Máy đã nhận số liệu cải chính từ trạm Base nhưng chưa giải xong bài toán đa trị nguyên. Sai số dao động từ vài chục centimet đến dưới một mét. Trạng thái này thường xuất hiện thoáng qua trong lúc khởi đo hoặc kéo dài khi điều kiện thu tín hiệu kém.
- Fixed (lời giải cố định): Bài toán đa trị nguyên đã được giải thành công, sai số mặt bằng thường chỉ còn 1 đến 2 centimet. Đây là trạng thái duy nhất được phép thu thập số liệu.
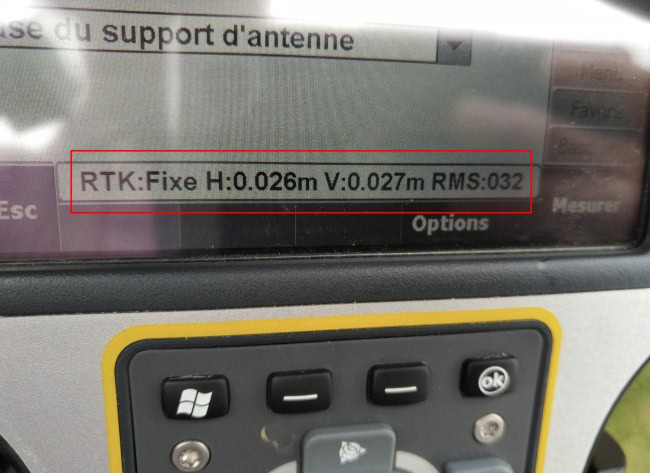
Máy thu GNSS báo trạng thái Fixed – sẵn sàng thu thập dữ liệu.
Bên cạnh trạng thái lời giải, người đo nên theo dõi thêm các chỉ tiêu chất lượng hiển thị kèm theo: Số lượng vệ tinh đang sử dụng (nên từ 12 trở lên với máy đa hệ thống), chỉ số phân bố hình học vệ tinh PDOP (nên nhỏ hơn 3) và sai số ước tính theo phương ngang, phương đứng. Khi máy mãi không lên trạng thái Fixed, hãy kiểm tra lần lượt: kết nối kênh truyền còn hoạt động không, vị trí đứng có bị che chắn bầu trời không, và khoảng cách đến trạm Base có vượt quá phạm vi khuyến nghị hay không.
Xem thêm: Lỗi không đạt nghiệm Fixed khi sử dụng phương pháp đo động thời gian thực RTK trên máy GNSS
Thu thập, kiểm tra và xuất dữ liệu thực địa
Khi trạm Rover đã đạt trạng thái Fixed ổn định, công tác đo chính thức bắt đầu. Một nguyên tắc kiểm soát chất lượng mà mọi đơn vị đo đạc chuyên nghiệp đều tuân thủ là: Trước khi đo điểm mới, hãy đo kiểm tra vào một mốc đã biết tọa độ. Nếu chênh lệch giữa kết quả đo và tọa độ gốc của mốc kiểm tra nằm trong hạn sai cho phép (thường dưới 3 centimet về mặt bằng), toàn bộ cấu hình hệ thống được xác nhận là đúng. Ngược lại, phải dừng lại rà soát ngay từ trạm Base.
– Thao tác đo tại từng điểm
- Đặt mũi sào đúng vào điểm cần đo, giữ sào thẳng đứng theo bọt thủy. Với các máy thu GNSS có tính năng đo nghiêng, người đo có thể đo ngay cả khi sào nghiêng đến 30 độ – tính năng đặc biệt hữu ích khi đo chân tường, góc khuất hoặc mép rãnh.
- Nhấn nút đo trên bộ điều khiển. Máy thường thu trung bình số liệu trong 3 đến 5 giây tùy thiết lập để lấy giá trị tọa độ ổn định nhất. Với điểm khống chế quan trọng, nên tăng thời gian thu lên 10 đến 15 giây và đo lặp hai lần ở hai thời điểm khác nhau.
- Đặt tên điểm và mã đối tượng (mã hiện trạng) một cách hệ thống ngay từ đầu để thuận tiện cho khâu biên tập bản đồ về sau.
– Kiểm tra và xuất số liệu
Kết thúc buổi đo, trước khi tắt máy hãy rà soát sơ bộ số liệu ngay trên bộ điều khiển: Kiểm tra số lượng điểm, soát các điểm có sai số vượt ngưỡng và đo bù nếu cần. Sau đó xuất số liệu ra các định dạng thông dụng như CSV, TXT hoặc DXF, đồng thời sao lưu cả tệp dự án gốc sang thẻ nhớ hoặc lưu trữ đám mây. Thói quen sao lưu hai bản độc lập sẽ giúp bạn tránh được rủi ro mất trắng số liệu của cả ngày làm việc.
Những sai sót thường gặp ngoài thực địa và cách phòng tránh
Thực tế triển khai hệ GNSS tại hàng trăm công trình cho thấy phần lớn số liệu hỏng không đến từ thiết bị mà đến từ thao tác của con người. Dưới đây là các lỗi phổ biến nhất cùng biện pháp phòng tránh tương ứng:
- Nhập sai tọa độ hoặc chiều cao ăng-ten trạm Base: Đây là lỗi nghiêm trọng nhất vì làm lệch hệ thống toàn bộ số liệu. Phòng tránh bằng nguyên tắc hai người kiểm tra chéo khi nhập liệu và luôn đo kiểm tra vào mốc đã biết trước khi đo chính thức.
- Khai báo sai 7 tham số tính chuyển hoặc kinh tuyến trục: Tọa độ sẽ lệch hàng chục mét hoặc bị xoay méo cục bộ. Nên lưu sẵn bộ thông số chuẩn của từng khu vực thành mẫu dự án trên bộ điều khiển để dùng lại, hạn chế nhập tay mỗi lần.
- Thu số liệu khi máy đang ở trạng thái Float: Vì nóng vội, một số người đo bấm đo khi máy chưa lên Fixed, dẫn đến điểm có sai số vài chục centimet lẫn trong số liệu tốt. Hãy bật chế độ chỉ cho phép lưu điểm ở trạng thái Fixed nếu phần mềm hỗ trợ.
- Đo tại vị trí bị che chắn hoặc nhiễu đa đường: Dưới tán cây rậm, sát nhà cao tầng, cạnh mặt nước lớn hoặc gần đường dây điện cao thế, tín hiệu phản xạ làm lời giải kém tin cậy dù máy vẫn báo Fixed. Với các điểm bắt buộc phải đo ở vị trí như vậy, nên đo lặp nhiều lần và so sánh kết quả.
- Hết nguồn giữa buổi đo: Trạm Base hết pin khiến toàn bộ Rover mất số liệu cải chính. Luôn tính toán thời lượng pin theo khối lượng công việc và ưu tiên cấp nguồn ắc-quy ngoài cho trạm Base khi đo cả ngày.
Chi phí đầu tư hệ GNSS Base – Rover: Những yếu tố cần cân nhắc
Câu hỏi được quan tâm nhiều nhất khi tìm hiểu hệ GNSS Base – Rover này là chi phí đầu tư. Mức giá của một hệ GNSS Base – Rover hoàn chỉnh dao động trong biên độ khá rộng, phụ thuộc vào các yếu tố kỹ thuật sau:
- Số kênh thu và số hệ thống vệ tinh hỗ trợ: Một hệ GNSS Base – Rover sử dụng máy thu đầy đủ bốn hệ thống vệ tinh với hàng nghìn kênh thu cho lời giải nhanh và ổn định hơn ở khu vực khó, nhưng giá thành cao hơn đáng kể so với dòng phổ thông.
- Hệ GNSS có tính năng đo bù nghiêng: Giúp tăng năng suất đo từ 20 đến 30 phần trăm ở địa hình phức tạp, là khoản chênh lệch giá đáng đầu tư với đơn vị đo đạc chuyên nghiệp.
- Công suất và cấu hình bộ phát vô tuyến: Bộ phát rời công suất lớn kèm ăng-ten và ắc-quy là hạng mục cần dự trù riêng nếu thường xuyên thi công vùng không có sóng di động.
- Thương hiệu và chế độ hậu mãi: Các thương hiệu cung cấp hệ GNSS Base – Rover lâu đời có giá cao hơn nhưng đi kèm độ bền, phần mềm hoàn thiện và mạng lưới bảo hành rộng. Các thương hiệu mới nổi có lợi thế giá nhưng cần cân nhắc kỹ năng lực hỗ trợ kỹ thuật của nhà phân phối.
Về tổng thể, một hệ GNSS Base – Rover gồm hai máy thu GNSS kèm bộ điều khiển ở phân khúc phổ thông hiện có mức đầu tư từ khoảng trên dưới một trăm triệu đồng, trong khi cấu hình cao cấp đầy đủ tính năng có thể lên đến vài trăm triệu đồng, thậm chí hàng tỷ đồng. Bên cạnh phương án mua đứt, người dùng còn có hai lựa chọn giúp tối ưu dòng tiền:
- Thuê thiết bị theo ngày hoặc theo tháng: Phù hợp với các dự án ngắn hạn hoặc giai đoạn cao điểm cần tăng cường máy.
- Chỉ đầu tư một máy Rover và đăng ký dịch vụ trạm tham chiếu hoạt động liên tục: Giảm gần một nửa chi phí thiết bị ban đầu, đổi lại phát sinh phí thuê bao dịch vụ hằng năm và phụ thuộc vào vùng phủ của mạng lưới trạm.
Ngoài chi phí đầu tư hệ GNSS ban đầu, cần dự trù thêm chi phí hiệu chuẩn thiết bị GNSS định kỳ theo quy định và chi phí bảo trì, thay thế phụ kiện trong suốt vòng đời sử dụng. Mức giá chính xác cho từng cấu hình thay đổi theo thời điểm và chính sách của nhà phân phối, vì vậy cách tốt nhất là yêu cầu báo giá theo đúng nhu cầu công việc thực tế của đơn vị mình.
Hệ GNSS Base – Rover mang lại năng lực đo đạc nhanh, chính xác và hiệu quả vượt trội so với các phương pháp truyền thống, nhưng giá trị đó chỉ được khai thác trọn vẹn khi người đo nắm vững nguyên lý và tuân thủ nghiêm ngặt quy trình vận hành.
Liên hệ với đội ngũ kỹ thuật của EKTECH qua HOTLINE 0983 206 789 để được tư vấn cấu hình hệ GNSS Base – Rover, nhận báo giá chi tiết theo nhu cầu thực tế hoặc đặt lịch demo thiết bị trực tiếp tại đơn vị của bạn.
Bài viết liên quan

Quy trình đo cơ bản với máy toàn đạc điện tử. Vì sao thiết bị tốt vẫn cho kết quả sai?
Máy toàn đạc điện tử chỉ phát huy hết độ chính xác khi được vận [...]

Máy định vị vệ tinh GNSS là gì? Vì sao đo được chính xác đến từng centimet?
Máy định vị vệ tinh GNSS là thiết bị sử dụng tín hiệu từ các [...]

Làm thế nào để triển khai hệ thống GNSS hiệu quả cho dự án? Kinh nghiệm thực tế tại Việt Nam
Hiệu quả của một dự án GNSS không phụ thuộc hoàn toàn vào thiết bị, [...]

[Review] Đánh giá chi tiết 3 dòng máy GPS RTK được thị trường ưa chuộng năm 2026, đâu là lựa chọn tốt?
Trong năm 2026, 3 dòng máy định vị GPS RTK được thị trường đo đạc [...]

Ứng dụng công nghệ GNSS trong ngành xây dựng như thế nào?
GNSS (Global Navigation Satellite System) là hệ thống định vị vệ tinh toàn cầu giúp [...]

Trimble Business Center 2025.20 có gì mới? Ứng dụng
Phiên bản Trimble Business Center 2025.20 tiếp tục mang đến nhiều cải tiến quan trọng, [...]