Kiến thức thủy đạc
Các sai số thường gặp trong đo sâu đa tia và cách hiệu chỉnh

Th4
Đo sâu đa tia là công nghệ quan trọng trong khảo sát thủy đạc hiện đại, cho phép thu thập dữ liệu địa hình đáy biển với mật độ và độ chính xác cao. Tuy nhiên, hệ thống MBES chịu ảnh hưởng của nhiều nguồn sai số từ thiết bị, chuyển động tàu, môi trường và hệ thống định vị. Vì vậy, việc kiểm soát và hiệu chỉnh sai số là yếu tố quyết định chất lượng dữ liệu khảo sát.
Lý do cần kiểm soát và hiệu chỉnh sai số trong đo sâu đa tia
Đo sâu đa tia (Multibeam Echo Sounder – MBES) là công nghệ sử dụng nhiều tia sóng âm phát theo dạng quạt (fan-shaped beam) để đo độ sâu đáy biển trên một dải rộng vuông góc với hướng di chuyển của tàu khảo sát. So với máy đo sâu đơn tia, MBES cho phép thu thập dữ liệu địa hình đáy biển mật độ cao và diện tích lớn trong thời gian ngắn.
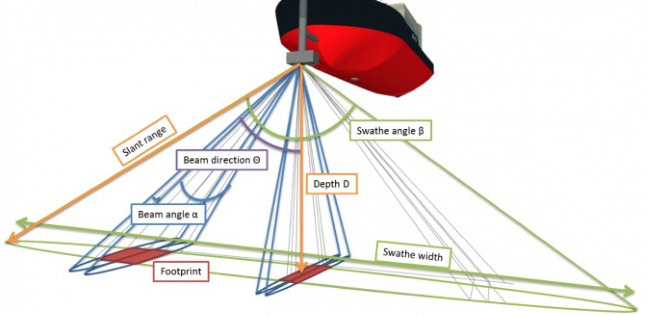
Mô phỏng về đo sâu đa tia.
Tuy nhiên, độ chính xác của dữ liệu MBES phụ thuộc vào nhiều hệ thống cảm biến khác nhau như:
- Hệ thống định vị GNSS.
- Hệ thống đo chuyển động tàu (Motion sensor).
- La bàn con quay (Gyrocompass).
- Cảm biến tốc độ âm trong nước (Sound Velocity Sensor).
- Hệ thống đồng bộ thời gian.
- Hệ thống đo mực nước triều.
Do dữ liệu độ sâu được tính từ thời gian truyền sóng âm, góc phát tia và vị trí tàu, nên bất kỳ sai số nào trong các hệ thống trên đều có thể dẫn đến sai lệch đáng kể trong mô hình địa hình đáy biển (Bathymetry). Nếu không kiểm soát sai số:
- Độ sâu có thể bị sai lệch vài chục centimet đến vài mét.
- Xuất hiện hiện tượng sọc dữ liệu (striping) giữa các tuyến khảo sát.
- Tạo ra địa hình giả (artifacts) trên bản đồ đáy biển.
- Ảnh hưởng đến an toàn hàng hải và công trình biển.
Sai số trong đo sâu đa tia ảnh hưởng đến an toàn hàng hải và công trình biển.
Do đó, việc kiểm soát và hiệu chỉnh sai số là yêu cầu bắt buộc trong khảo sát thủy đạc, đặc biệt khi dữ liệu được dùng để:
- Lập hải đồ hàng hải.
- Khảo sát luồng tàu.
- Khảo sát công trình dầu khí.
- Khảo sát cáp ngầm và đường ống.
Phân loại các nhóm sai số trong đo sâu đa tia và ảnh hưởng của chúng
Trong khảo sát đa tia, sai số thường được chia thành 4 nhóm chính:
– Sai số hệ thống (Systematic Errors)
Đây là sai số xuất hiện do thiết bị hoặc cấu hình hệ thống. Các nguồn sai số phổ biến:
- Sai số căn chỉnh hệ thống (alignment errors).
- Sai số độ trễ thời gian (latency).
- Sai số offset vị trí cảm biến.
- Sai số góc lắp đặt đầu dò.
Ảnh hưởng:
- Dữ liệu bị lệch vị trí.
- Các tuyến khảo sát không khớp nhau.
- Xuất hiện hiện tượng lệch theo hướng di chuyển.
Sai số này thường được hiệu chỉnh bằng Patch Test.
– Sai số do chuyển động tàu (Motion Errors)
Tàu khảo sát luôn chịu tác động của sóng và gió, tạo ra các chuyển động:
- Heave (dao động lên xuống).
- Pitch (chúi – ngẩng).
- Roll (lắc ngang).
- Yaw (quay ngang).
Nếu hệ thống đo chuyển động không chính xác:
- Các tia ngoài rìa (outer beams) sẽ bị sai độ sâu lớn.
- Dữ liệu bị bẻ cong hoặc nghiêng.
Sai số roll đặc biệt nguy hiểm vì có thể gây sai số hàng mét ở mép dải quét.
– Sai số do môi trường (Environmental Errors)
Các yếu tố môi trường ảnh hưởng trực tiếp đến đường truyền sóng âm:
- Tốc độ âm trong nước: Tốc độ âm phụ thuộc vào nhiệt độ, độ mặn, áp suất… Nếu hồ sơ tốc độ âm (SVP – Sound Velocity Profile) không chính xác sẽ dẫn đến tia âm bị khúc xạ sai, tạo ra hiện tượng smile hoặc frown trong dữ liệu (hình dạng mặt vui / buồn).
- Mực nước triều: Độ sâu đo được phải được quy về mốc chuẩn độ sâu (Chart Datum). Nếu dữ liệu triều sai sẽ làm cho toàn bộ dữ liệu sẽ bị dịch lên hoặc xuống.
– Sai số định vị (Positioning Errors)
Sai số định vị xuất phát từ: GNSS, sai số anten, sai số offset giữa anten và đầu dò.
Ảnh hưởng:
- Dữ liệu bị dịch ngang.
- Các tuyến khảo sát không trùng nhau.
Quy trình kiểm soát và hiệu chỉnh sai số đo sâu đa tia
Việc kiểm soát sai số trong đo sâu đa tia được thực hiện trong 3 giai đoạn:
– Trước khi khảo sát
- Hiệu chuẩn thiết bị: Các thiết bị cần kiểm tra là GNSS, motion sensor, gyro, multibeam sonar.
- Đo offset hệ thống để xác định chính xác vị trí: Anten GNSS, motion sensor, đầu dò MBES so với điểm tham chiếu tàu (vessel reference point).
- Patch Test: Patch Test nhằm xác định các sai số roll error, pitch error, yaw error, latency. Phương pháp:
+ Chạy nhiều tuyến khảo sát theo các hướng khác nhau.
+ So sánh dữ liệu giao cắt. - Đo hồ sơ tốc độ âm: Sử dụng thiết bị SVP probe, CTD profiler để đo Sound Velocity Profile.
– Trong quá trình khảo sát
Trong quá trình khảo sát với hệ thống đo sâu đa tia cần kiểm soát liên tục:
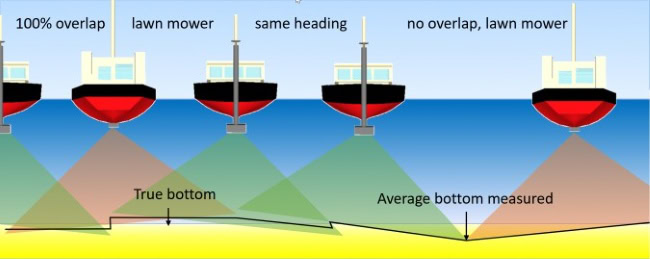
- Kiểm tra chất lượng dữ liệu realtime: Quan sát hình dạng dải quét, độ phủ đáy, nhiễu dữ liệu.
- Đo SVP định kỳ: Thông thường 2–4 giờ/lần hoặc khi thay đổi khu vực.
- Kiểm tra tuyến giao cắt: Các tuyến khảo sát nên có crossline để kiểm tra độ chính xác, phát hiện sai số hệ thống.
- Kiểm soát GNSS và motion sensor: Theo dõi tín hiệu vệ tinh, chất lượng RTK/PPP, dữ liệu heave.
– Sau khi khảo sát
Sau khảo sát cần xử lý dữ liệu trong các phần mềm chuyên dụng như: CARIS HIPS, Hypack, QPS Qimera.
Các bước xử lý gồm:
- Bước 1. Áp dụng hiệu chỉnh SVP, hiệu chỉnh triều, hiệu chỉnh Patch Test.
- Bước 2. Lọc nhiễu dữ liệu để loại bỏ tia sai, phản xạ giả, nhiễu bọt khí.
- Bước 3. Kiểm tra tuyến giao cắt. So sánh độ sâu giữa các tuyến để đánh giá sai số, đảm bảo đạt tiêu chuẩn.
- Bước 4. Tạo mô hình địa hình đáy. Kết quả cuối cùng là Bathymetric Grid, Digital Terrain Model (DTM).
Các quy chuẩn của IHO về khảo sát đo sâu đa tia
Tổ chức International Hydrographic Organization (IHO) ban hành tiêu chuẩn khảo sát thủy đạc trong tài liệu: IHO S-44 – Standards for Hydrographic Surveys.Tiêu chuẩn này quy định độ chính xác tối thiểu của dữ liệu độ sâu.

IHO S-44 – Standards for Hydrographic Surveys phiên bản 6.1.0.
Các cấp khảo sát gồm:
| Cấp khảo sát | Ứng dụng |
| Special Order | Cảng biển, luồng tàu quan trọng |
| Order 1a | Luồng tàu |
| Order 1b | Vùng ven bờ |
| Order 2 | Vùng nước sâu |
Công thức sai số độ sâu theo IHO:
Sai số tổng hợp cho phép: TVU = sqrt{a^2 + (b times d)^2}
Trong đó:
- TVU: Total Vertical Uncertainty.
- a: sai số cố định.
- b: sai số tỷ lệ theo độ sâu.
- d: độ sâu.
Ví dụ tiêu chuẩn IHO:
| Order | a | b |
| Special | 0.25 m | 0.0075 |
| Order 1a | 0.5 m | 0.013 |
| Order 2 | 1.0 m | 0.023 |
Điều này nghĩa là độ sâu càng lớn thì sai số cho phép càng tăng.
Đo sâu đa tia là công nghệ quan trọng trong khảo sát thủy đạc hiện đại, cho phép thu thập dữ liệu địa hình đáy biển với mật độ và độ chính xác cao. Tuy nhiên, hệ thống MBES chịu ảnh hưởng của nhiều nguồn sai số từ thiết bị, chuyển động tàu, môi trường và hệ thống định vị. Vì vậy, việc kiểm soát và hiệu chỉnh sai số là yếu tố quyết định chất lượng dữ liệu khảo sát.
Quy trình kiểm soát sai số phải được thực hiện xuyên suốt ba giai đoạn: Trước khảo sát, trong khảo sát và sau khảo sát, đồng thời tuân thủ các tiêu chuẩn quốc tế của IHO S-44. Việc tuân thủ các tiêu chuẩn này đảm bảo dữ liệu đo sâu đáp ứng yêu cầu an toàn hàng hải và các ứng dụng kỹ thuật biển.
Nếu bạn có bất kỳ thắc mắc nào cần giải đáp về đo sâu đa tia hoặc đang tìm hiểu các công nghệ đo sâu đa tia hiện đại, đừng ngần ngại gọi đến HOTLINE 0983 206 789, EKTECH sẽ hỗ trợ bạn nhanh chóng nhất!
>>> Xem thêm: R3Vox – Giải pháp đo sâu đa tia thế hệ mới cho các dự án khảo sát thủy đạc
Bài viết liên quan

Sóng biển tác động như thế nào đến hoạt động hàng hải? Dự báo sóng bằng công nghệ gì?
Sóng biển là yếu tố chi phối trực tiếp an toàn tàu thuyền, hoạt động [...]

Khảo sát thủy đạc là gì? Toàn cảnh công nghệ đo đạc và lập bản đồ dưới nước
Không giống địa hình trên cạn, phần lớn địa hình dưới nước không thể quan [...]
Side Scan Sonar hay Multibeam? Phân tích kỹ thuật giúp chọn đúng công nghệ khảo sát đáy
Side Scan Sonar phù hợp phát hiện vật thể và nhận dạng bề mặt đáy, [...]

Phao báo hiệu năng lượng mặt trời: Giải pháp báo hiệu hàng hải bền vững cho luồng cảng và vùng biển xa
Phao báo hiệu năng lượng mặt trời là thiết bị báo hiệu hàng hải sử [...]

An toàn luồng hàng hải: 5 nhóm rủi ro khi dùng báo hiệu hàng hải không đạt chuẩn IALA và cách nhận diện
Hệ thống báo hiệu hàng hải không đạt chuẩn có thể dẫn đến mắc cạn, [...]
Đầu tư Multibeam 3D cho dự án khảo sát cảng biển, nạo vét, offshore, khi nào hợp lý và chọn hệ thống nào?
Đầu tư thiết bị Multibeam 3D là quyết định chiến lược tác động trực tiếp [...]